
Feet

Click to enlarge
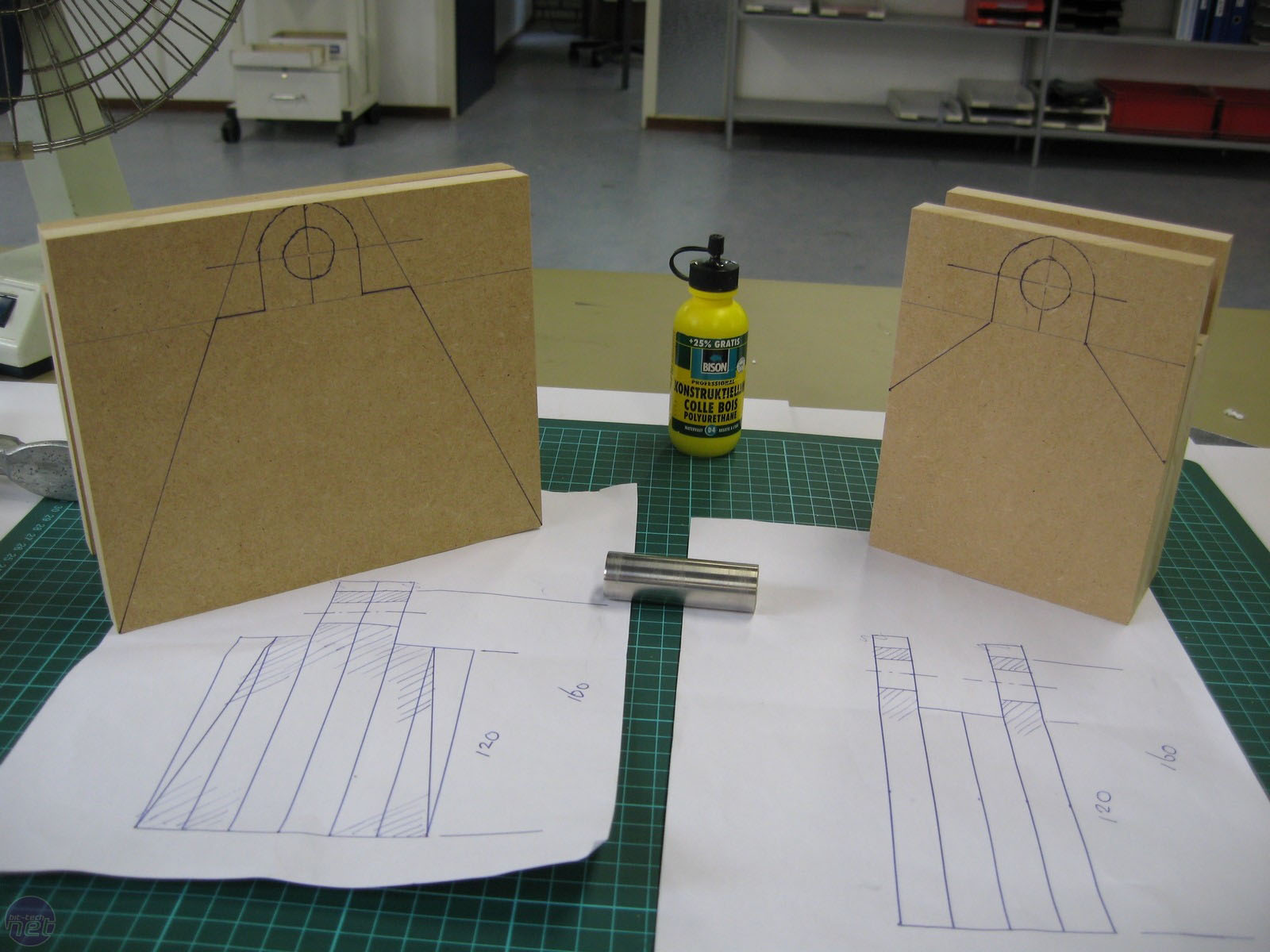
In the end I decided to add that third leg to gain more stability. I started with some more MDF wood, and measured up something that related in size to the other two feet, as well as the large metal pins I would use for a pivots to hold the legs and body to the feet.
Click to enlarge
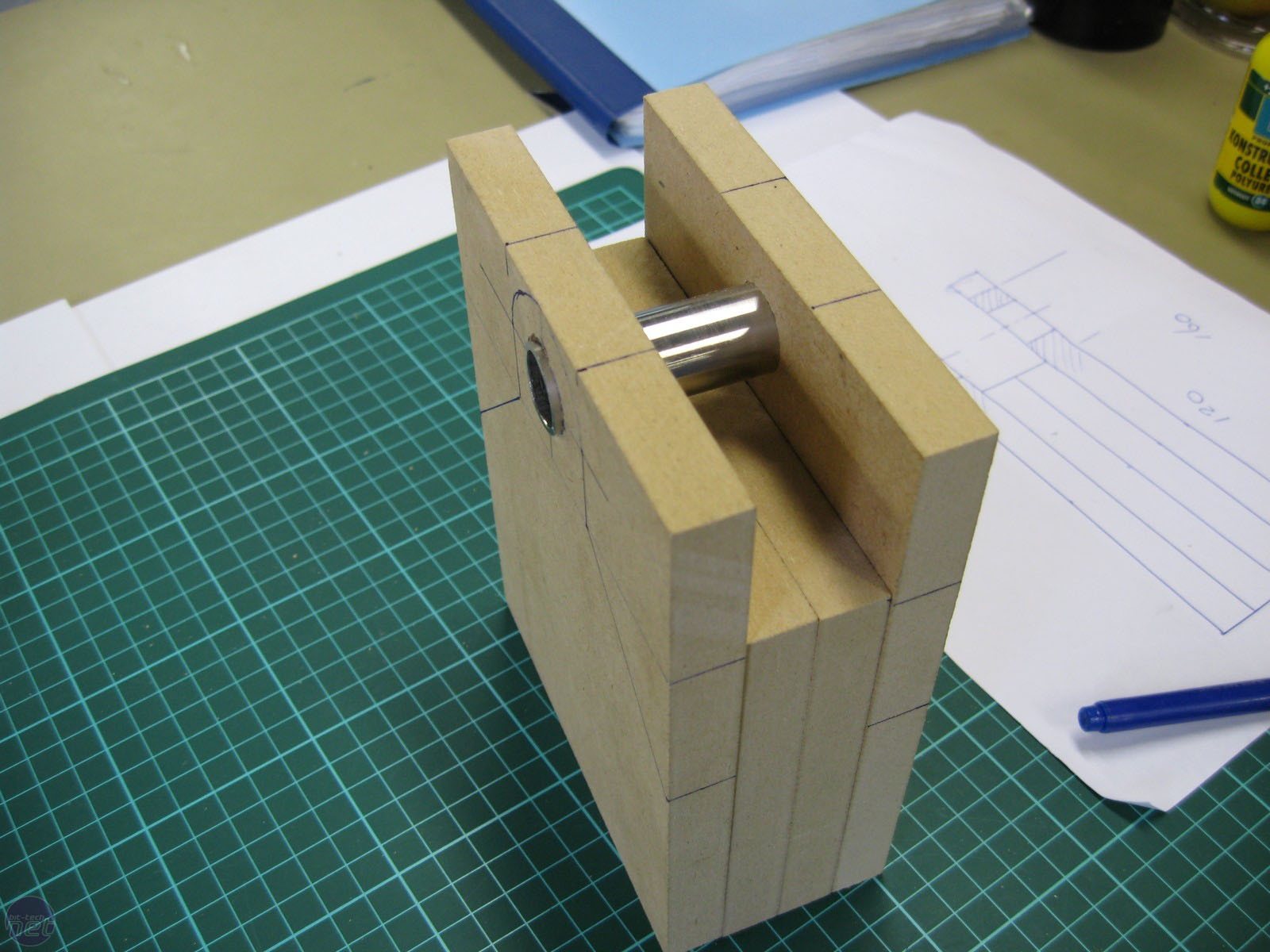
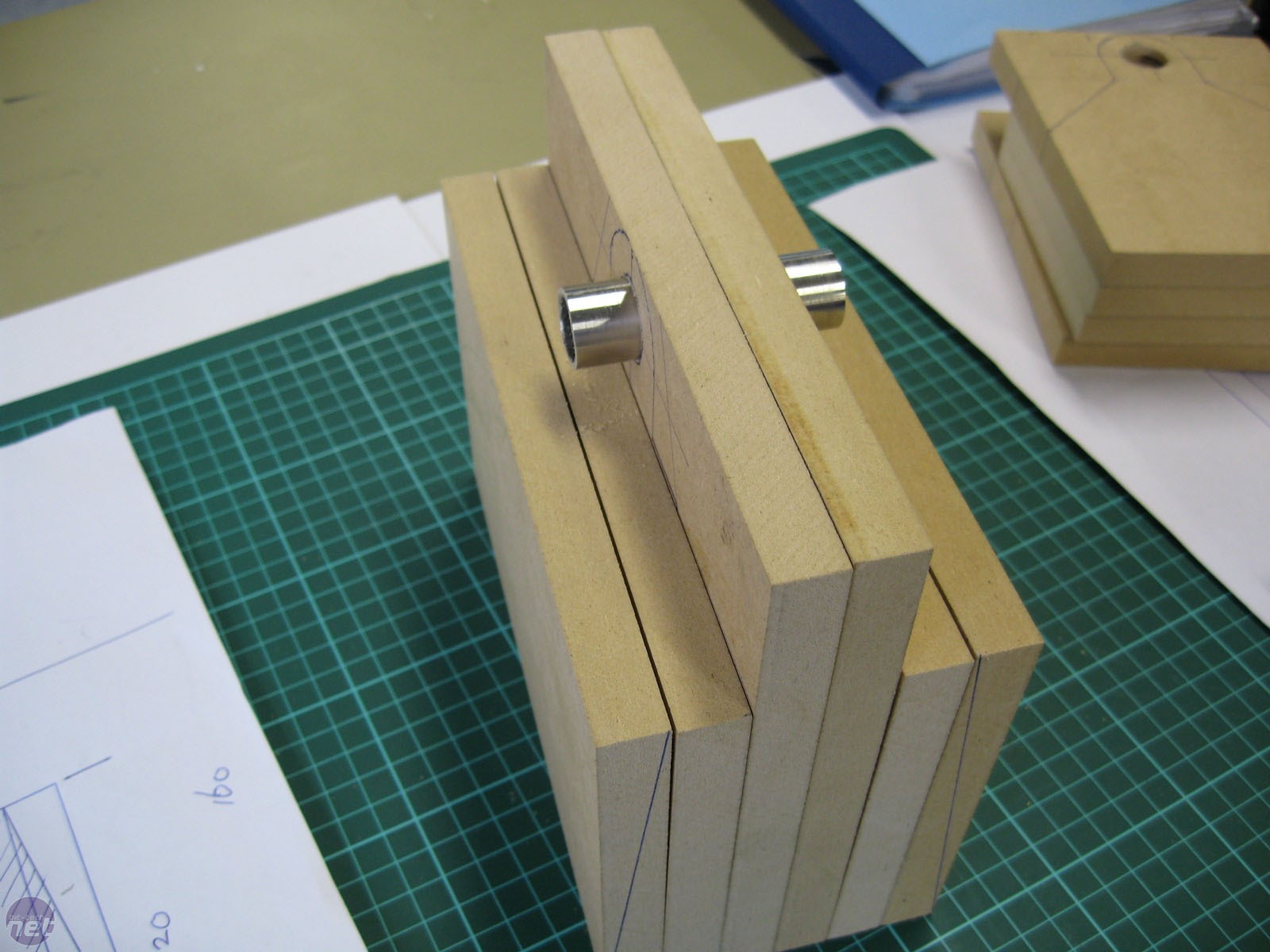
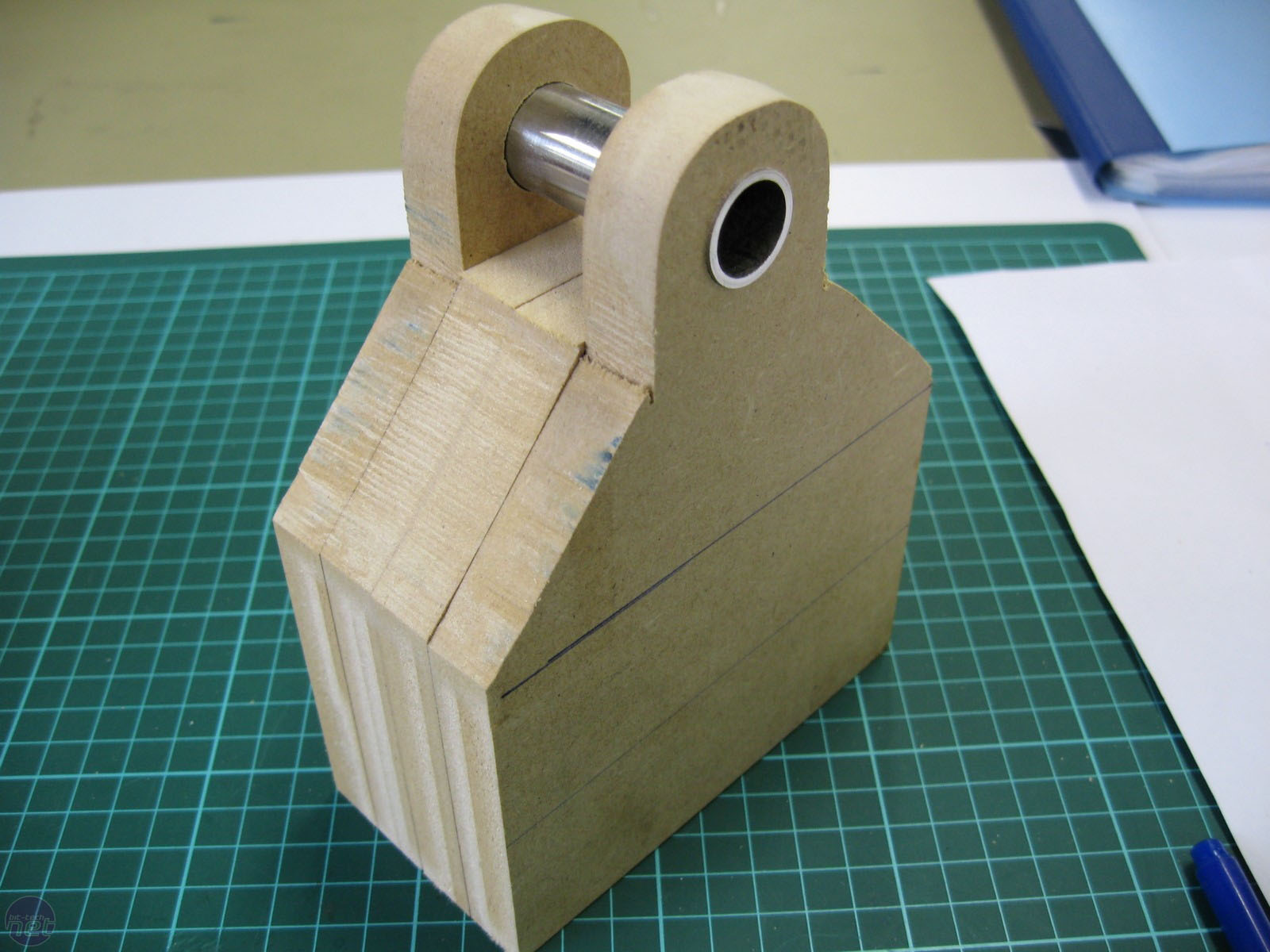
There's the female part (top right) and the male part (above left) which fit together to make a hinge. After some gluing, sawing, filing and sanding down I had something that looked far more foot-like.



Click to enlarge
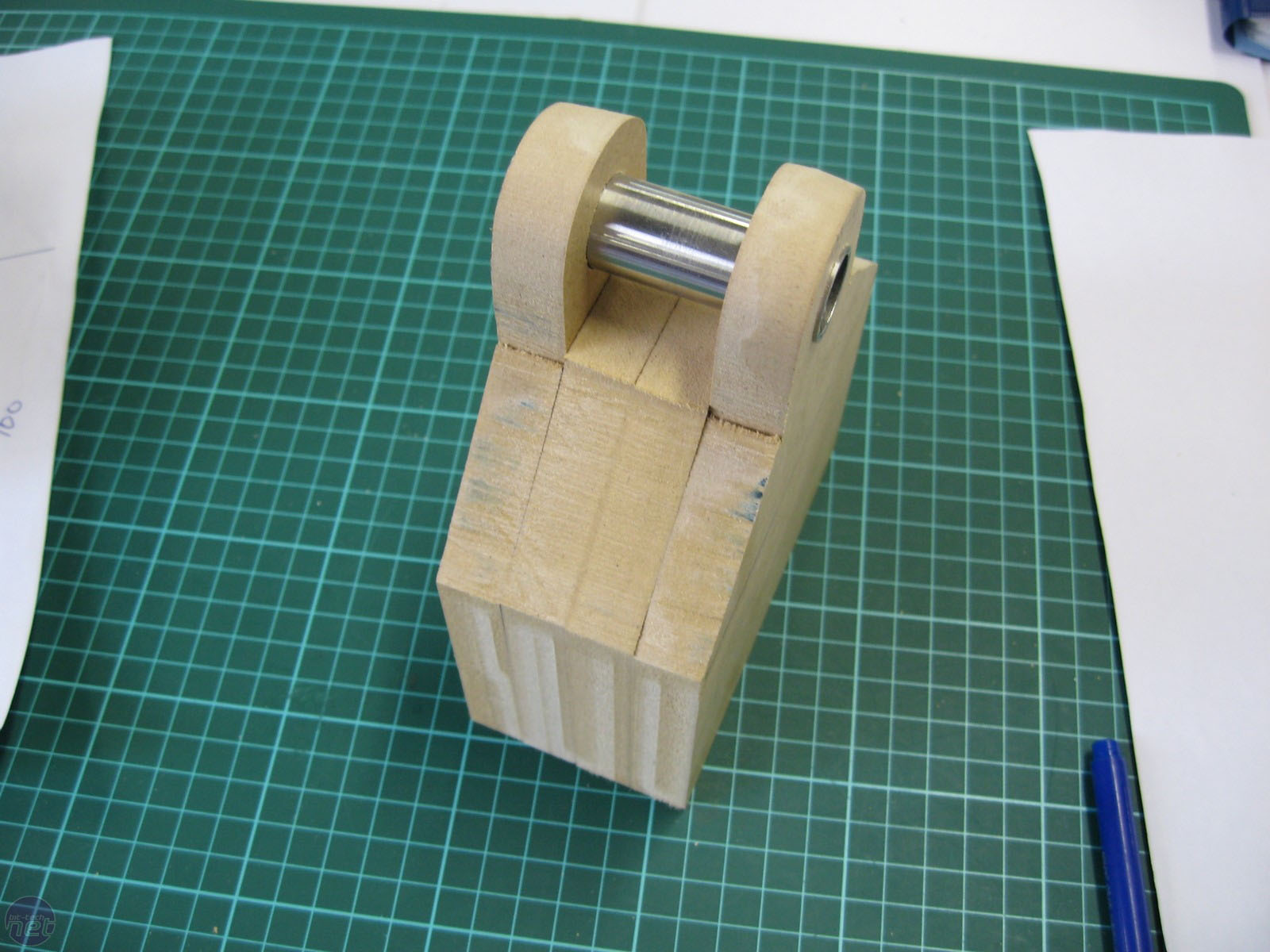
Here is the third leg (no rude jokes, please) with a hinged foot, and also standing by its two brothers above.



Click to enlarge
The foot was then attached with construction glue to the base of the R2 body, then painted up white to match. In conversing with some friends, at this point I realised the two straight up legs gives a strange look because the normal angle for the R2 robot is 18 degrees, so I had to modify the other two ankles to match this look, otherwise he will look far too upright and rigid.



Click to enlarge
RELATED ARTICLES







MSI MPG Velox 100R Chassis Review
October 14 2021 | 15:04

Want to comment? Please log in.